
A necessidade de reduzir os custos provenientes da preparação de encomendas faz com que, atualmente, e cada vez com maior frequência, sejam utilizadas soluções baseadas em sistemas de picking automáticos. Isso ocorre devido às grandes vantagens dessa modalidade, tais como a diminuição dos operários necessários, um perfeito controlo e gestão do stock, a possibilidade de construir armazéns de grande altura, a ausência de equipamentos de movimentação para fazer picking, etc. A mercadoria que costuma ser armazenada nesse tipo de sistema é, geralmente, de consumo médio e complementa as encomendas de paletes completas.
Há basicamente quatro configurações que são utilizadas para poder realizar picking automatizado sobre paletes:
- Disponibilizar postos de picking no terminal do armazém automático
- Fazer a mesma coisa, mas na lateral do armazém automático
- Estabelecer postos de picking em zonas adjacentes
- Recorrer a robôs especiais para picking.
Analisamos cada um desses sistemas a seguir.
Postos de picking no terminal do armazém automático
Trata-se da solução mais habitual quando se refere a armazéns pequenos ou médios onde o picking não é a operação fundamental. Há diferentes soluções que podem ser adotadas em função da quantidade de encomendas que devem ser preparadas e cada uma delas tem aplicações e rendimentos diferentes, por isso será preciso fazer uma análise específica de cada caso para saber qual é a configuração de elementos mais adequada. Nesta foto observamos um exemplo de como pode ser a zona de picking no terminal.

Postos de picking no terminal de um armazém automático
Postos de picking na lateral do armazém automático
A configuração dessa alternativa baseia-se em disponibilizar estantes dinâmicas no nível mais baixo, ao nível do solo, na lateral do armazém automático, na parte orientada para o exterior, de modo que a extremidade fique num corredor tal como se observa na fotografia a seguir.

Sistemas de picking na lateral de um armazém automático
Nessas posições dinâmicas, que admitem entre duas e três paletes por canal, colocam-se as paletes de maior consumo, tal como observamos na foto acima. As paletes completas de reserva estão em outras posições convencionais, principalmente nas que ficam sobre as dinâmicas, para que o transelevador possa repô-las à medida que forem sendo esvaziadas.
O operário faz o picking percorrendo toda a parte lateral do armazém automatizado da estante com o auxílio de um porta-paletes ou um selecionador de encomendas. O picking dos restantes produtos, situados nos demais corredores e que são de menor consumo, é feito nos postos de picking colocados no terminal.
Tal sistema de picking na parte lateral é compatível com a colocação de dispositivos pick to light, o que facilita e aumenta o rendimento das tarefas de preparação de encomendas.
Picking em zonas adjacentes
Para produtos de grande consumo, bem como para reduzir os tempos de preparação, uma boa solução é ter uma zona de picking dinâmico para paletes em ambos os lados de um corredor de trabalho. A movimentação é realizada mediante lançadeiras que alimentam os canais dinâmicos.
As paletes de reserva são depositadas num armazém automático com transelevador. A interligação entre esse armazém e as lançadeiras de picking é realizada através de transportadores de rolos ou carros, carris eletrificados ou veículos autoguiados (AGV e LGV).
O equipamento de movimentação recomendável para ser utilizado pelos operários é o porta-paletes elétrico ou o preparador de encomendas ao nível do solo.
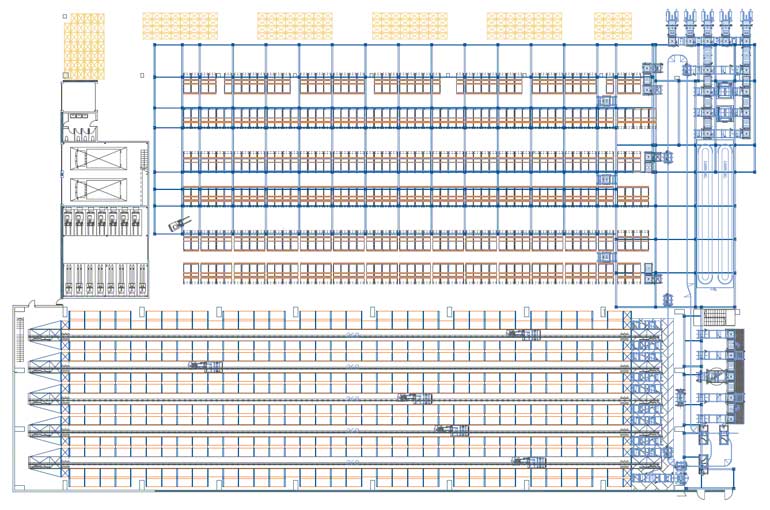
Exemplo de distribuição dos postos de picking num armazém automático

Distribuição de paletes em transportadores de rolo
Picking automático mediante robôs
Para fazer picking maciço e como forma de complementar os armazéns automáticos, podem ser instalados robôs de picking, que são capazes de manipular automaticamente caixas individuais ou camadas completas de caixas.

Robô antropomórfico para a manipulação de paletes
Os robôs podem ser de três tipos: antropomórficos, pórticos com dois eixos e pórticos com três eixos. A utilização de um ou outro depende, fundamentalmente, dos ciclos por hora que se pretendam realizar e a combinação das encomendas:
- Os robôs antropomórficos são capazes de girar 360º e cada um tem um braço articulado que combina diferentes movimentos. Com eles é possível aceder às caixas ou camadas em qualquer ponto que esteja no seu raio de ação. O esquema de funcionamento é semelhante ao da imagem inferior, onde se ilustra um sistema de picking automático com robô despaletizador:

- Os pórticos de dois eixos, por sua vez, têm um braço manipulador rígido dotado apenas de um movimento vertical. O carro no qual o braço é fixado desloca-se horizontalmente sobre o pórtico, o que permite aceder a qualquer ponto que esteja situado numa mesma fila.
É possível aceder a várias paletes, geralmente colocadas em quatro ou cinco posições, sendo duas de origem e as restantes de destino.
O esquema de funcionamento é ilustrado na imagem seguinte:


Imagem de um robô pórtico de dois eixos

Imagem de um robô pórtico de três eixos
- Quanto aos pórticos de três eixos, o seu funcionamento é semelhante aos de dois eixos, mas todo o pórtico se desloca ao longo de um terceiro eixo sobre uma estrutura lateral. Isso permite aceder com a máquina a duas filas de paletes diferentes, destinando cada uma das posições de origem ou destino. Consequentemente, há uma maior diversificação das encomendas, bem como aumenta a capacidade para preparar um maior número delas.
O esquema de funcionamento é ilustrado na imagem a seguir:
